Child nodes:
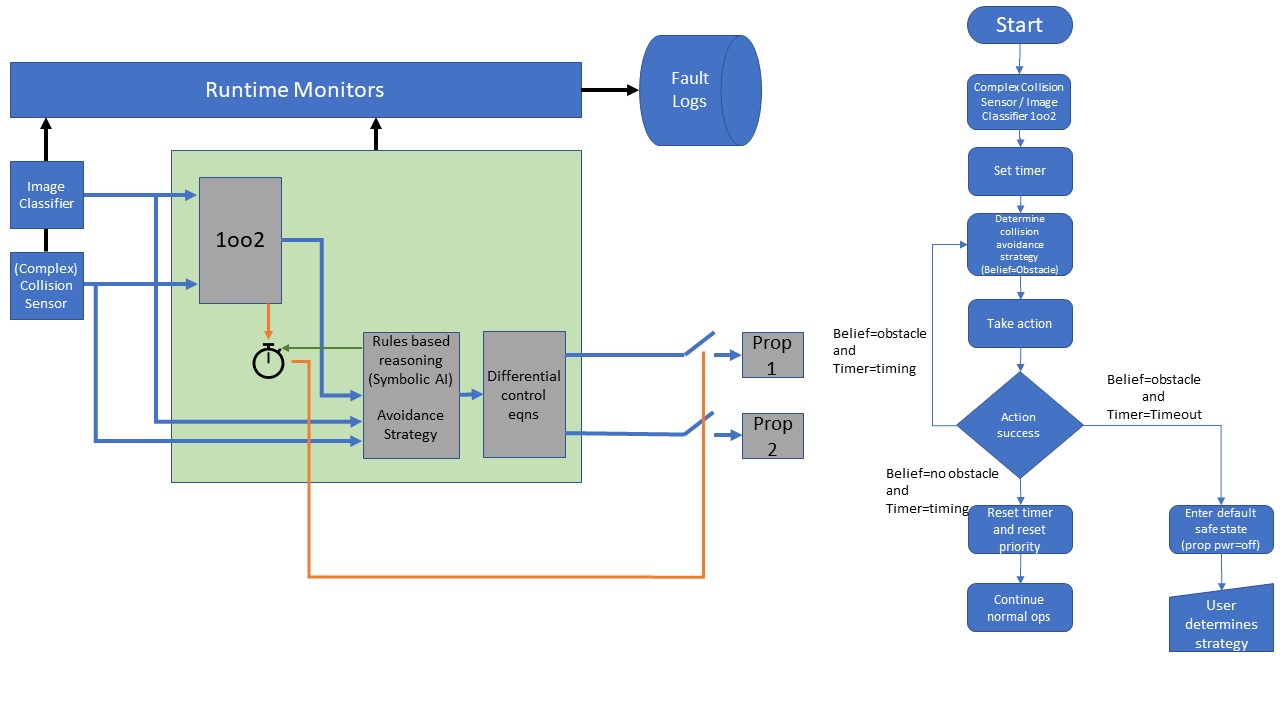
The (Complex) Collision Sensor and Image Classifier individually indicate to the 1oo2 voting that there is an obstacle in the robot's path. However the safety claim is placed on the (Complex) Collision Sensor system. They both make clear, unambiguous indications of the presence of an obstacle to the 1oo2 voting. The Image Classifier acts as an unclaimed support. The (Complex) Collision Sensor system is designed using traditional hardware and software techniques.
The flow chart describes the operation of this SIF.
Runtime monitors and a WDT have been used to ensure that the robot operates within its prescribed operating envelope and does not deadlock or freeze without entering the default safe state for the SIF.